 1 / 3
1 / 3Harvest robot




Hardware Price:
DOF
5
Max. payload
0.5
kg
Max. velocity
0,05
meters per second
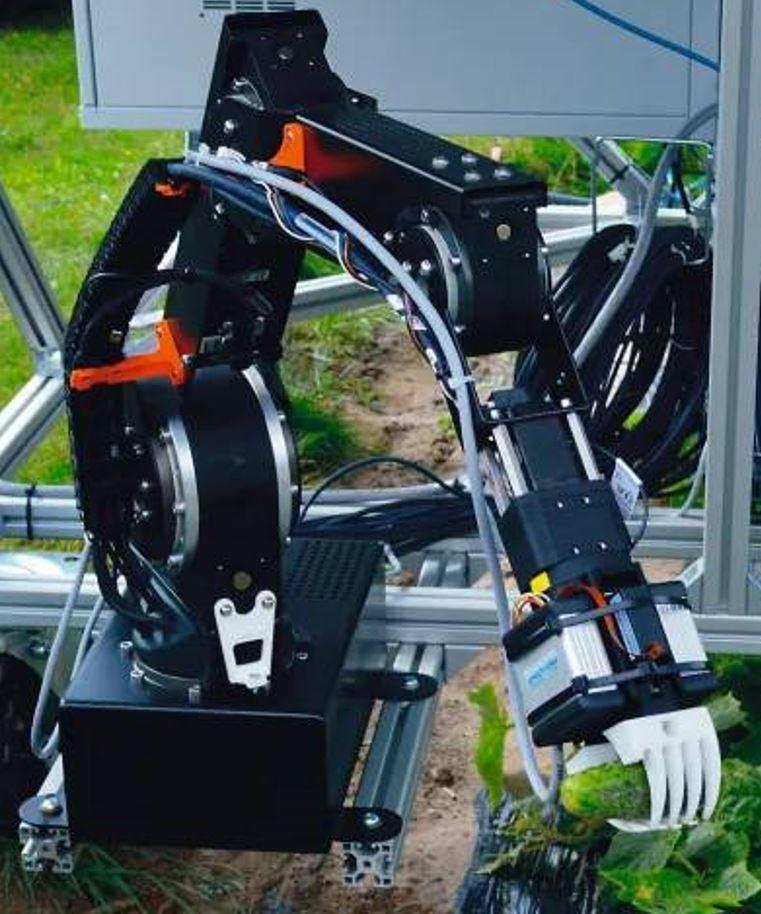
Catch Prototype: Automating Cucumber Harvesting with Robolink Robots
Cucumber harvesting presents unique challenges due to the green-on-green environment, requiring advanced technology for detection and separation. To address labor shortages and improve efficiency, the Catch prototype was developed within an 18-month research project. Using two Robolink robots from igus, the system automates the harvesting process, helping reduce reliance on seasonal labor while laying the groundwork for further advancements in agricultural automation.
What is the Application?
The Catch prototype automates cucumber harvesting by recognizing cucumbers in dense, covered green environments. With Robolink robots, it identifies and removes cucumbers efficiently, accelerating this repetitive yet critical agricultural task.
What are the Advantages of the Solution?
Labor Relief: Helps address shortages in seasonal agricultural work.
Improved Efficiency: Speeds up harvesting compared to manual methods.
Scalability Potential: Provides a framework for future agricultural automation improvements.
What are the Advantages of the Robot?
Robolink robots contribute unique strengths to Catch’s functionality:
Adaptability: Capable of navigating complex, covered environments.
Precision: Enables accurate detection and separation of cucumbers.
Robust Design: Supports further optimization for large-scale indoor or outdoor farming.
Optimizing Agriculture with Robolink Robots
The Catch prototype demonstrates the potential of robotics in solving agricultural challenges. While promising, the technology requires further refinement for wider market adoption. By automating demanding tasks like cucumber harvesting, Catch highlights the importance of robotics in creating sustainable, efficient farming practices that address labor shortages and operational inefficiencies.
1 Component








